
1Dシミュレーションを使った、動き物のシミュレーション事例です。
数値計算の結果をアニメーション動画として可視化することで、挙動が見える化され、問題の発見にもつながります。


多関節ロボットアーム
従来、多関節ロボットアームの各部の角度や変位を求めるには、計算式の構築に時間がかかったり、大きな計算負荷がかかっていました。弊社では、多数の回転・並進自由度を持つロボットアームや産業機器に適用可能な、新演算アルゴリズムを開発いたしました。障害物を避ける、任意の自由度間に角度の比率などの拘束を設定することが可能です。弊社では本アルゴリズムを搭載する機器を募集しています。
2段分離ロケット
外乱を受ける2段分離ロケットの1Dシミュレーションモデルです。10度の傾きを保つように推力方向を制御しつつ、連結部分にかかる荷重とトルクを求めています。その荷重とトルクから、連結部分に必要な形状の検討につなげます。形状ありきの検討ではなく、連結に必要な荷重とトルクから形状を検討するという、1D本来の使い方をしています。横方向の青い矢印は、ランダムに働く空気抵抗を表しています。1回の計算時間は約1秒です。
ロボットアーム フェールセーフ
左から4つ目の関節のモータが異常を検知し、駆動を停止してブレーキを掛けた後、残りの6つの関節を動かして、エンドエフェクターを所定の軌跡で動かすアルゴリズムを開発し、1Dシミュレーションに実装しました。
コマ
曲面上を動き回るコマのモデルです。曲面と先端との衝突・接触・摩擦を考慮しています。円周方向(コマの自転方向)、半径方向(コマの軸の傾き方向)で異なる摩擦力を設定しています。1回の計算時間は約2秒です。
オフィスチェア
黄色いタイヤのみ、位置が0.1mmずれることで、各タイヤにかかる荷重に違いが出る、という現象を1Dシミュレーションでモデル化しました。左側の10個の数字は、各タイヤにかかる荷重です。一番上の数字が黄色いタイヤにかかる荷重で、最も大きくなっています。1回の計算時間は約1秒です。
物体キャッチ
飛んできた物体を穏やかにキャッチし、入れ物に入れる、という動作を1Dシミュレーションでモデル化しました。1回の計算時間は約2秒です。
三輪運搬機
3つの黄色の車輪と地面との接触を考慮したモデルです。かける力によって、段差を乗り越えられるかどうかが決まります。黄色の車輪の径や、中心間距離を変えると、より小さな力で段差を乗り越えられるようになります。車輪を6個にしたり、回転バネを入れるなどの検討に使いました。1回の計算時間は約1秒です。
ノーバックラッシュギア
青と緑の2枚のギアの間に、回転バネによる与圧(正確には与トルク)がかかっており、赤いギアを挟むようになっています。
挟むトルクが強すぎると摩擦によって伝達効率が落ち、弱すぎるとバックラッシュが発生します。
実際の製品での、回転の速度や加速度(=動作シーケンス)によって、最適な与トルクやバネ定数が変わってきます。
カーリング
画面下から上に向かって動く赤のストーンは、回転によって進行方向が変わります。これは1Dシミュレーションでも十分モデル化できることがわかりました。1回の計算時間は約1秒です。
サイコロ
サイコロと床面との接触を定義し、ランダムに目が出るように1Dシミュレーションモデルを作りました。1万回計算したところ、各目が、ほぼ同じ確率で出現することを確認しています。1回の計算時間は約2秒です。
自転車
タイヤと地面の接触、ハンドル部分の回転を考慮した自転車のシミュレーションです。
青いボールは、わざと重心をずらすために置いています。
緑のボールの位置を制御して、走っていなくても自転車を自立させることを目指しましたが、うまくいっておりません。
ドラム式洗濯機
2つの洗濯物がドラムの中でたたき洗いされる様子を1Dシミュレーションでモデル化しています。ドラムはブラシレスモータで駆動し、たたき洗いされるように回転角度、角速度を制御しています。1回の計算時間は約1秒です。
動きの間欠表示
斜め上方投げ上げモデルです。初速度、初期回転速度を持つ棒が、空気抵抗を受けながら運動します。0.1秒ごとの姿勢を残すように、1Dシミュレーションで表示のロジックを作りました。
輪ゴム鉄砲
輪ゴムの伸び縮み、輪ゴムと割りばしの接触を考慮したモデルです。
トリガーに設置されたL字の部分に輪ゴムを引っ掛け、トリガーを引くことにより、輪ゴムがL字の部分から外れて飛び出すようになっています。
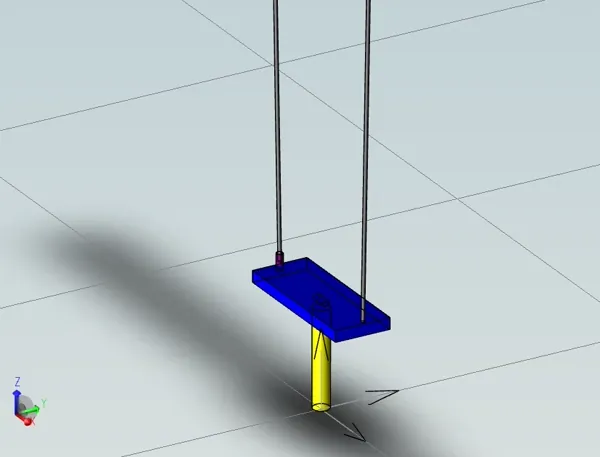
ブランコ
ブランコを揺らすモデルです。
黄色い円柱が足のモデルです。
タイミングよく足を振ると、ブランコの振り幅がだんだん大きくなっていきます。
足を振るタイミングを最適化すると、より少ない時間で振り幅を大きくすることができます。
鹿おどし
竹筒に水が徐々に溜まっていき、一定量を超えると竹筒が傾いて中の水が排出されます。